Keeping it TRON, and learning from mistakes!
This is a proof of concept, demonstrating video control via capacitive touch sensors with electroluminescent feedback. The MCU interacts with an ATMEL QT1111, while PWM controlling the high voltage EL panel through a fet and triac. In turn it talks serial with our computer, serving out some blown-out HD video.
The atmel qt1111 can sense up to 11 inputs and is configurable for up to 10mm of sense gap. Here we are transmitting through 6mm of tempered glass, and finally, have gotten a fast response time...which needs some background explanation:
We've used this set-up before for a previous install. The propeller MCU speaks SPI with the qt1111, then prints the result over serial to the CPU. This was simple and elegant, and it worked--though a bit laggy. But at the time, we had little time to improve code. So it was installed as is. Flash forward to now: another capacitive touch interactive. This time, we can't have the lag. All of the embedded software settings on the atmel IC were teaked, as were the noise reduction resistors and sense capacitors. But still, we had a 1-2 second detection time. We needed more like 100ms. The "Print" function was dropped for a byte transmission on a whim, and low and behold, we have the speed. The entire time, I thought it was the qt1111 that needed work, when really, the Print function on the MCU side was the time hog! And well in hindsight, it hurts to make that nullifying realization-- for what good reason was I using print?
Times like this, its nice to step-back and remember that it wasn't the only assigned project, but one of many. Small details like this can have very large impacts, and if you aren't completely focused, or stretched to thin (ahem, i claim this option), than you'll feel the consequences.
Incidentally, we'll be updating the embedded code to the previous install. And though it's only really a "firmware update," it feels good to know that the problem has been solved.
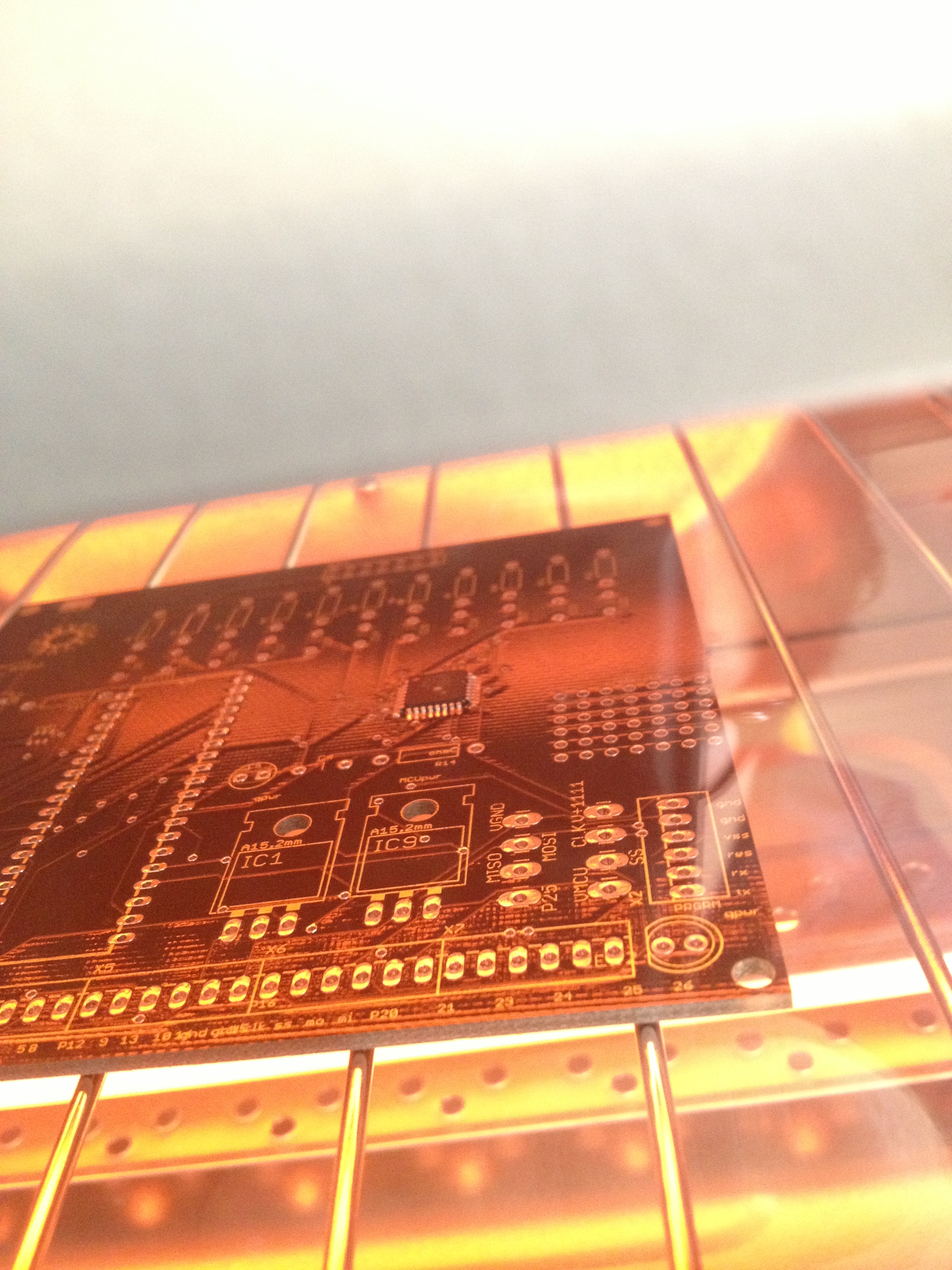
the QT1111 surviving the black and decker toaster-oven!
