
reflow toasted and all!
These "rover" boards contain an atmel 328, an xbee socket, a TI SN754410 motor controller, a RHT03 temperature & humidity sensor, and lastly, a simple photoresistor for light sensitivity. They are based on open source designs and will be open hardware as well. The original piecemeal prototype was exhibited at the 2013 Robot Block Party @ Stanford.
Here's the controller board and display:
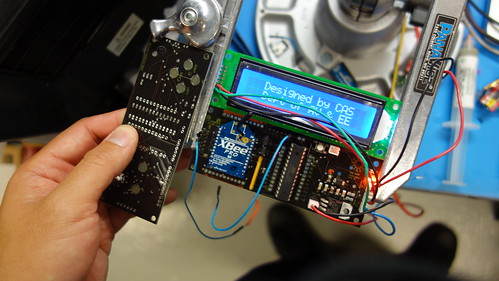
The board on the left shows the backside, where the NES styled membrane buttons will trigger input. Minus the motor controller & sensor, its essentially the same design as the rover board. You may notice that the mcu chipset is socketed instead of SMT. This was done just in case the boards get more hands-on use with children. For that matter, all of the i/o are still available and configurable.
Here's my fancy lack of style/technique in applying solder paste:
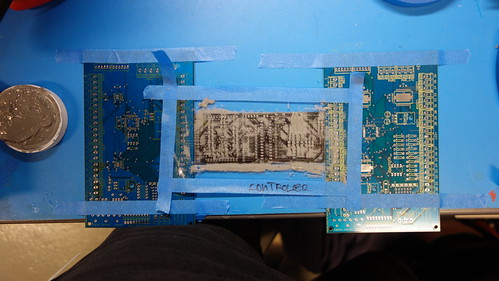
The stencils were acquired via http://www.pololu.com/ and worked out really well. The paste is chipquik NO CLEAN Sn63Pb37 (63/37), which is pretty similiar to the kester variety, but cheap and sold in quantities of 1! This is important since most jars of solderpaste are sold in quantities of 10 or more!
Lastly, here's an early boot screen, destined to change:
more soon! This instructables covers the prototype version.
