]
...a blurb for now, as this is under development, though deployed:
COMPONENTS:
-16 pop jets
-2.1 1000w PA
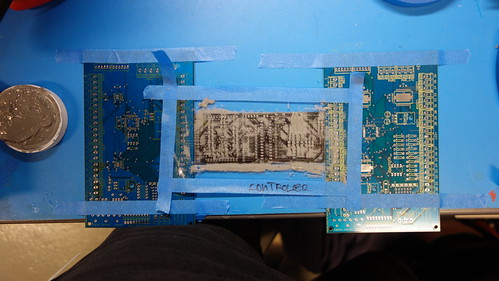
-1 plc
-1 Midi to digital showcontroller
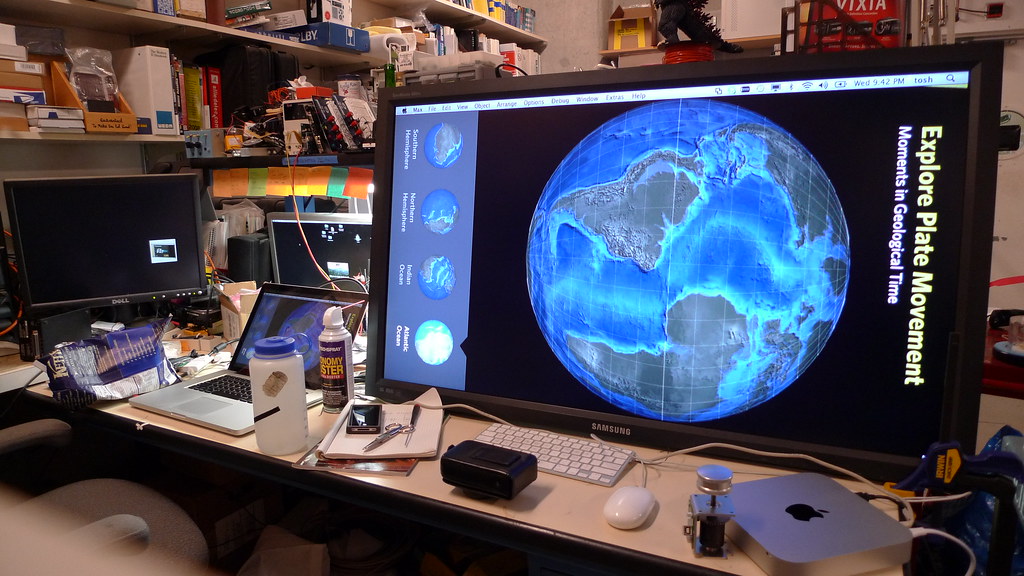
-1 mac mini
-max/msp
-4 vfd's
...the first thing people notice are the laminar, or "leap" jets (built and installed by the awesome people @ Sundance Water Design). In fact, a spectator inquired as to wether or not an emulsion had been added to the water. But the way it really works is quite simple. An inline cartridge of tubes attaches to a flow controlled inlet--thus diminishing turbulence (ripple and bubbles) and making the water clear. As it exits, the water is deflected by a
solenoid-controlled beam of water. This beam "splits" the clear water and deflects it back into the basin. When the solenoid engages, the splitter water stops, and the clear, laminar water, shoots out of the basin. In effect, its like a replacing the voltage in a transistor with water (water controlled water)! It's all very hypnotizing to watch.
After the hydraulic aspects were installed, the next step was/is integrating the audio, additional
control systems, and actual programming. The automation is working via max/msp and
GUI, and is still being developed. The programming to trigger the jets is done via
MIDI. Midi scores are created via max/msp & synthesizer, and are merged with the audio via Protools. The audio and midi files are then bumped to the mac mini, which shoots the midi triggers to the MediaMation MOE--which can be very cranky.
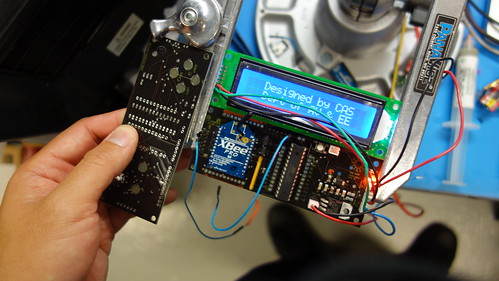
The MOE is a fantastic device, and it's easy to see why its used: its a versatile showcontroller that can be programmed via
web browser. Anyone can set it up with a basic understanding of what they are doing. Navigation, IO assignments, logic, serial control, pwm, events, routing, etc--all done by drop boxes and pop-up windows.
The tediousness of it all is incredibly trying; if only one could upload a control script or code! But, as I found out, you sorta can. The controller arrived with MIDI control CH #0, manipulating the
Variable Frequency Drive, which controls the height of the water. Unfortunately the synthesizer slider control is set in stone at #1, so, piece of cake right? Opened up the browser, deleted (like an idiot) the trigger and re-assigned it to #1. But I couldn't. The web browser would not let me assign the channel as it had been programmed!?
So, instead i went to the
JAVA based utility program, which allows you to pull the 5 or six config files from the MOE, and edit within a GUI. In this case, the utility would also not allow me to make the necessary reversion/edit (and this had nothing to do with permissions). So, instead I went straight to the config file, hand edited it with the logical substitutions and reloaded the code. Bam, perfect. But, for a good while, I was seriously freaking out about having "lost" automated height control.
After that, there was some max/msp object juggling to get midiout with control values and single vs. multiple track midi.
Now, its just nailing the fringe aspects of the automation and programming 5 more songs. Normally I focus on the infrastructure of a system, whereas here, I'm also in the position of programmer/content creator, which gives this project a heavy load, but makes me incredibly devoted to it.
In fact,
DMX may soon be integrated into the system!
...to be continued